Penalty Kick Robot
A spring-driven kicking leg is modeled around energy transfer, release timing, contact point, and soccer penalty trajectory control.
- Institution
- University of California, Berkeley
- Team
- Maxime Hache, Maria Estrada, Harry Schwartz
- Mechanical Design
- CAD
- Mechanisms
- Test & Validation
- Simulation
- Dynamics

Overview
The concept adapts the idea of a field-goal kicking robot to soccer penalties, where precision and ball trajectory matter more than maximum power.
The report explicitly states that the CAD prototype was built for SolidWorks simulations rather than immediate physical fabrication.
Challenge
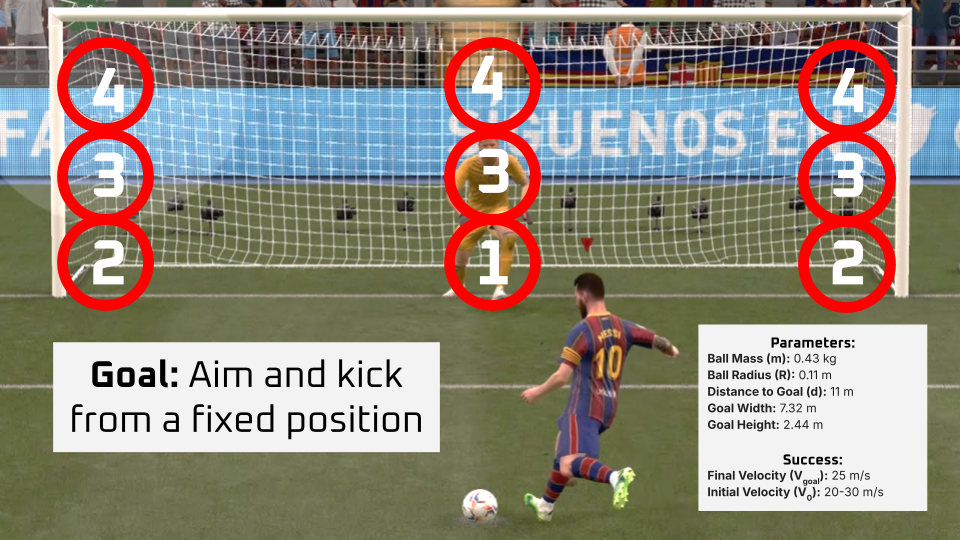
A penalty-kick robot must control direction, speed, and lift by striking different regions of the ball.
The team had to simplify the mechanism while still reasoning about force, contact time, friction, target zones, and shot scenarios.
Process
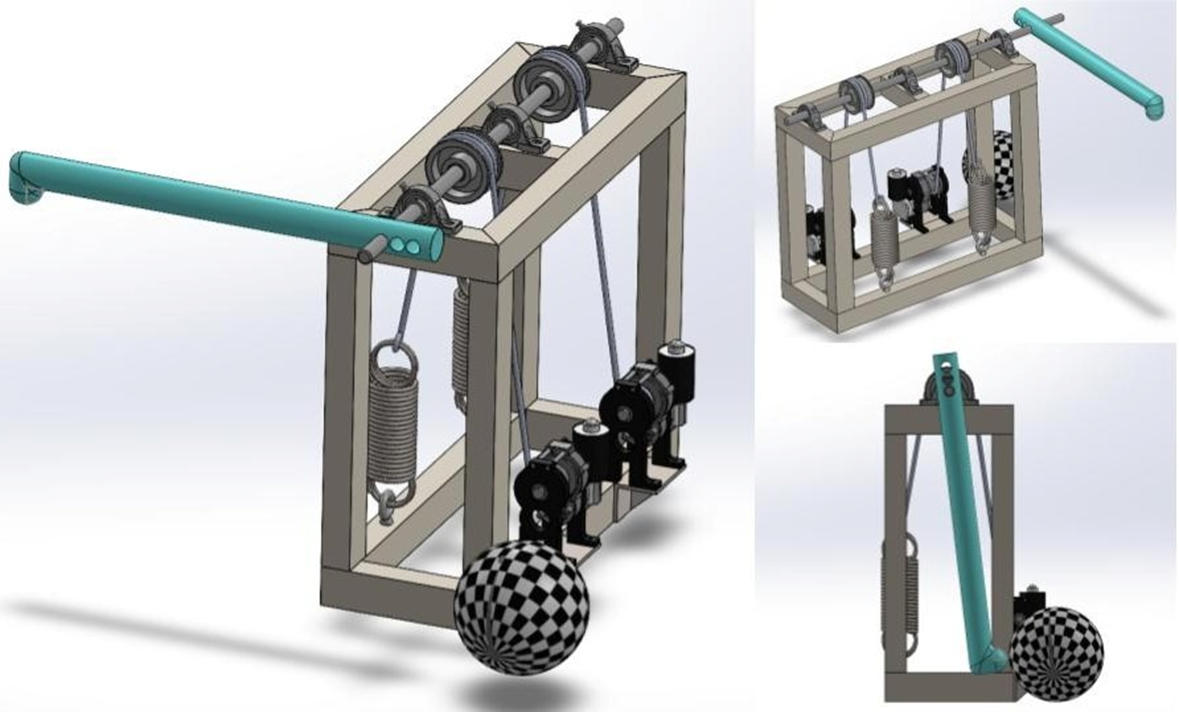
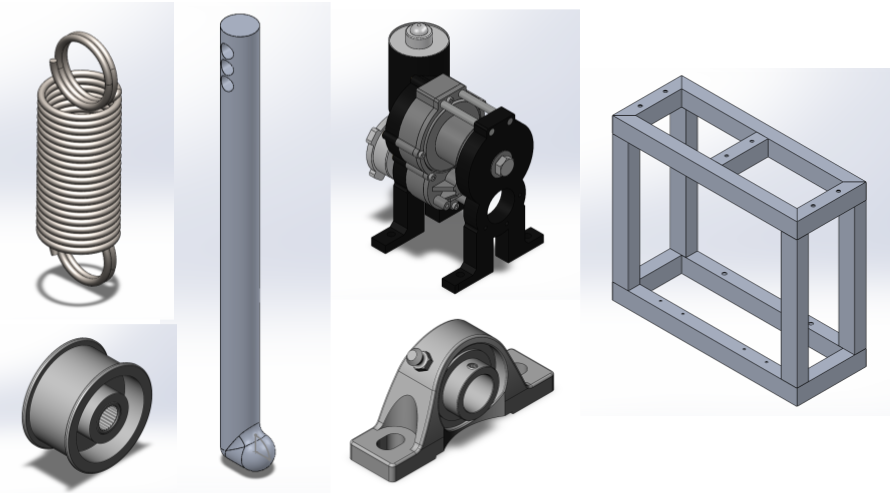
The mechanism uses a scaled foosball-like rotary leg with springs, a winch, pulley cable, and pivot points.
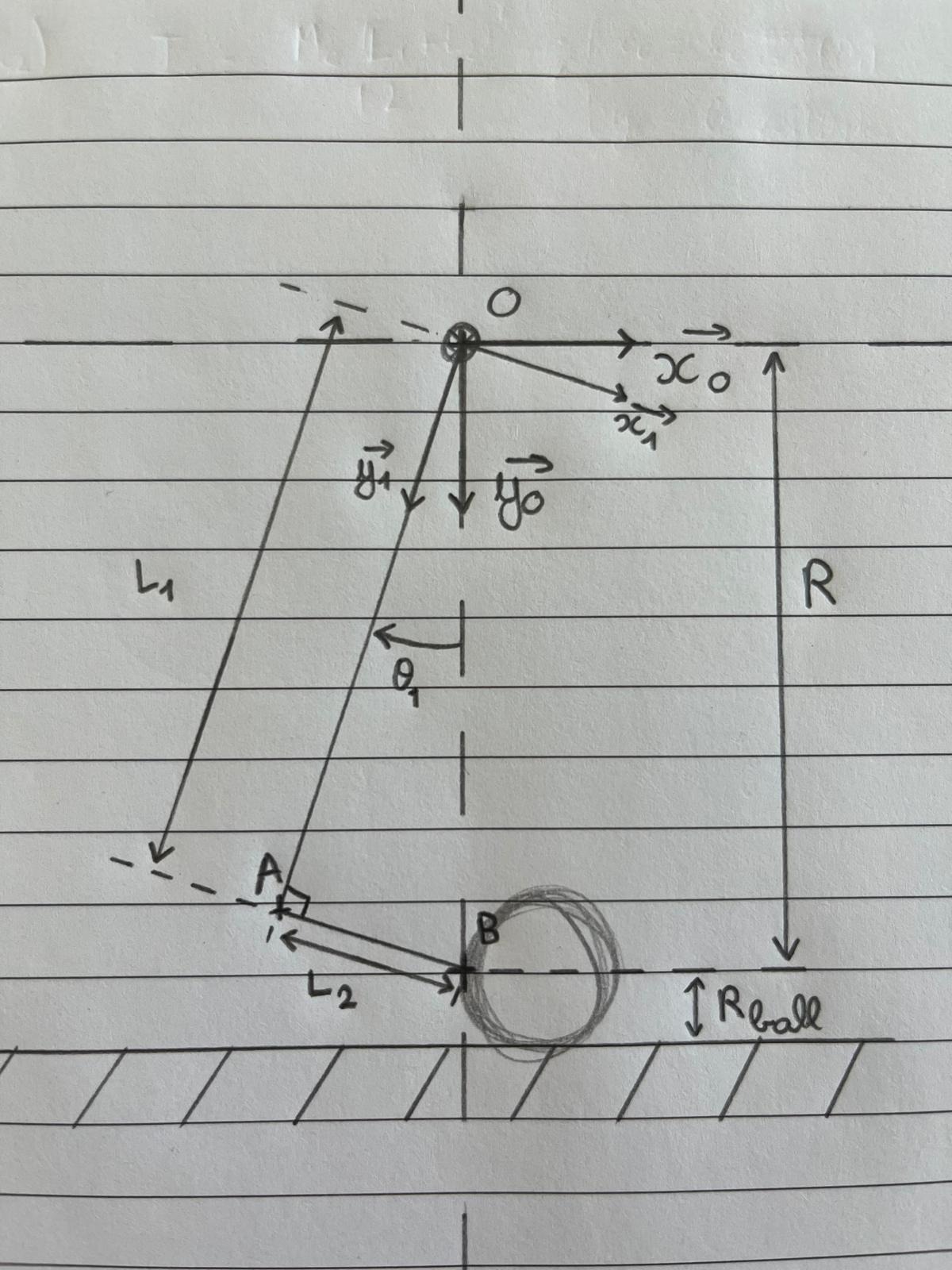
The team calculated ball properties, goal dimensions, friction assumptions, required speed ranges, and shot-contact scenarios.
Engineering Details
SolidWorks, MATLAB, mechanism modeling, spring-force calculations, ball-impact assumptions, and simulation-based validation.
Implementation
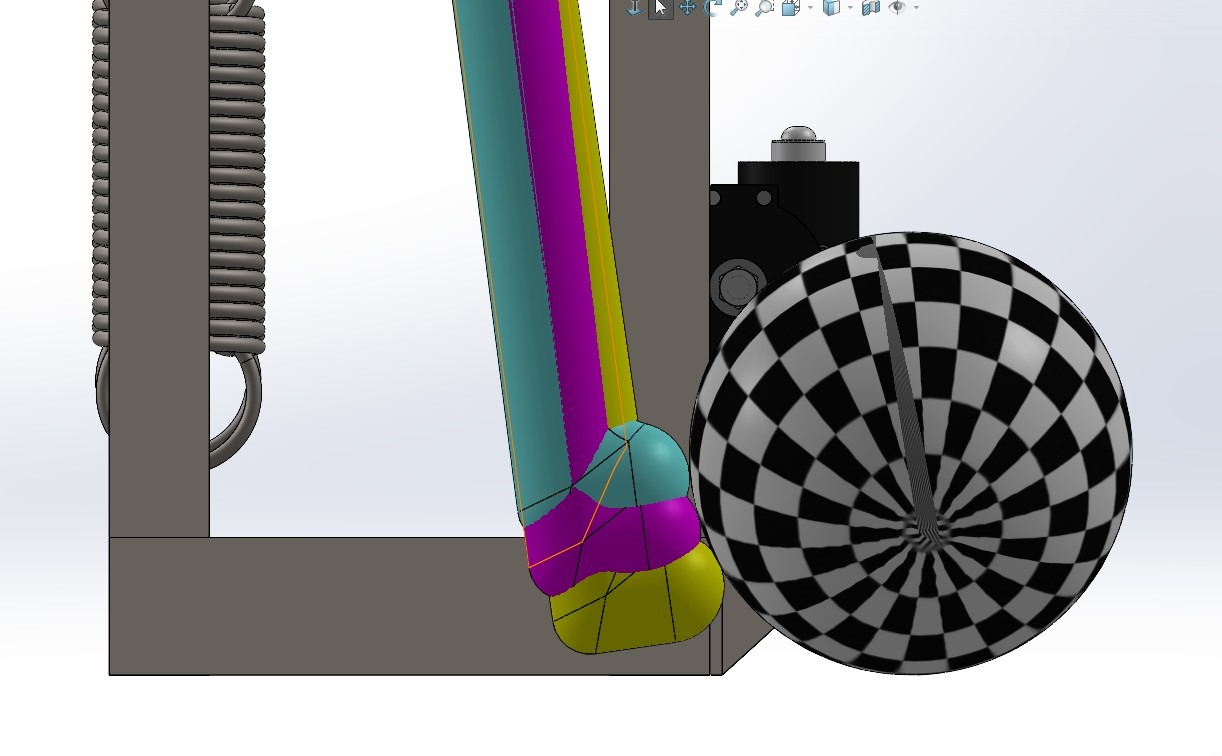
The CAD model uses an aluminum tube leg, rotary shaft, spring drive, and pivot geometry intended to strike specific points on the ball.
Future lift scenarios revealed a limitation: the leg would need a secondary pivot to reach higher-corner shots with a smaller contact radius.
Testing
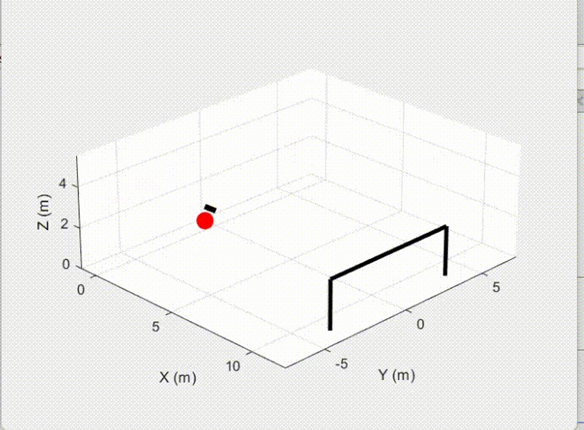
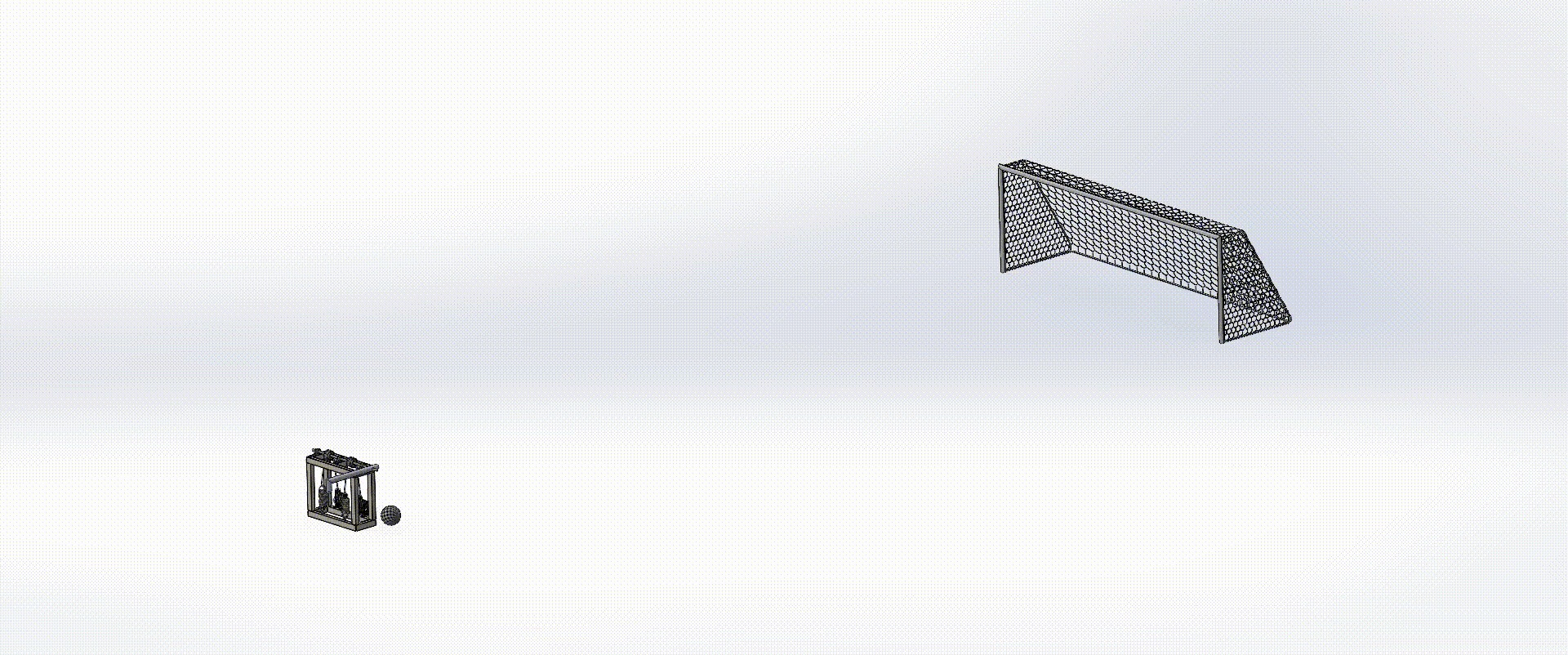
Validation was simulation-based, including MATLAB trajectory work and SolidWorks motion/impact studies shown in the gallery.
The source report includes desired initial and goal velocities, but the public page does not claim a built robot achieved those values.
Outcomes
The project shows how mechanism design, sports physics, and simulation can be combined before committing to hardware.
Contact geometry and degrees of freedom become decisive when moving from straight ground shots to side and lifted shots.
Build and instrument a physical prototype, add a second pivot for lifted shots, validate impact force experimentally, and refine contact timing.
Gallery