Gyroscopic Glove for Hand Tremors
A glove-mounted gyroscope prototype explores whether adjustable wrist stabilization can reduce tremor effects during everyday hand tasks.
- Institution
- University of California, Berkeley
- Team
- Maxime Hache, Marissa Shoji, Xochitl Ortega, Jackie Li
- Research
- Mechanical Design
- CAD
- Prototyping
- Test & Validation
- Embedded Systems
- Medical Devices
- Signal Processing

Overview
The team framed tremor reduction as both a mechanical and user-centered problem, prioritizing comfort, donning speed, task compatibility, cost, and power reliance.
A weighted Pugh chart selected a gyroscope concept over electrical nerve stimulation and a forearm brace concept.
Challenge
Hand tremors vary by person, task, fatigue, and stress, so the device needed adjustability and a form factor compatible with everyday movement.
The prototype also had to avoid over-restricting fingers and preserve as much functional hand use as possible.
Process
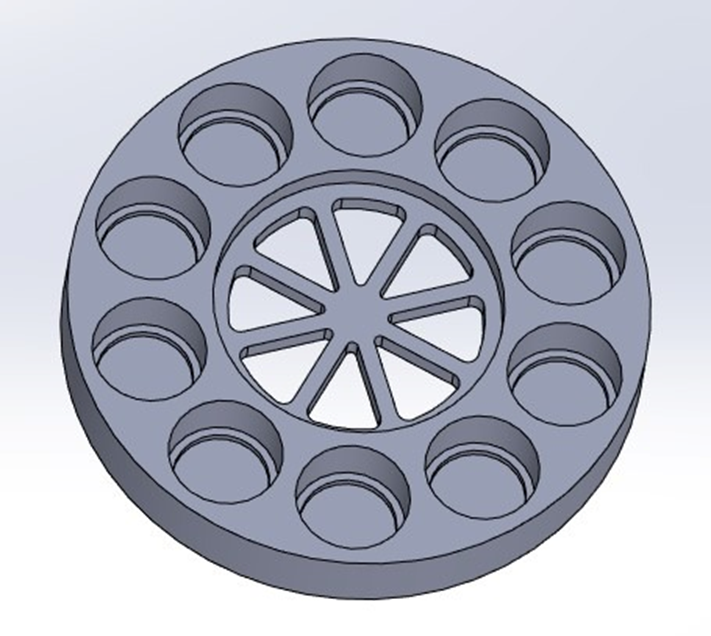
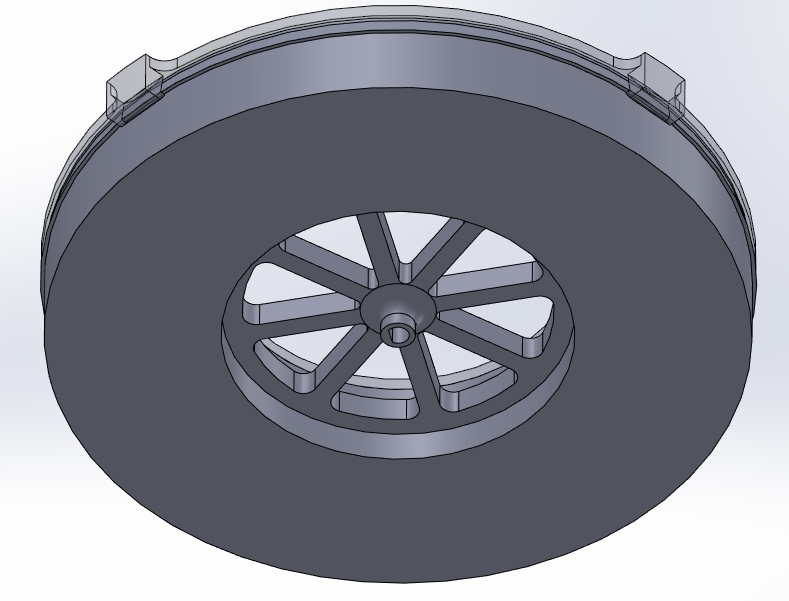
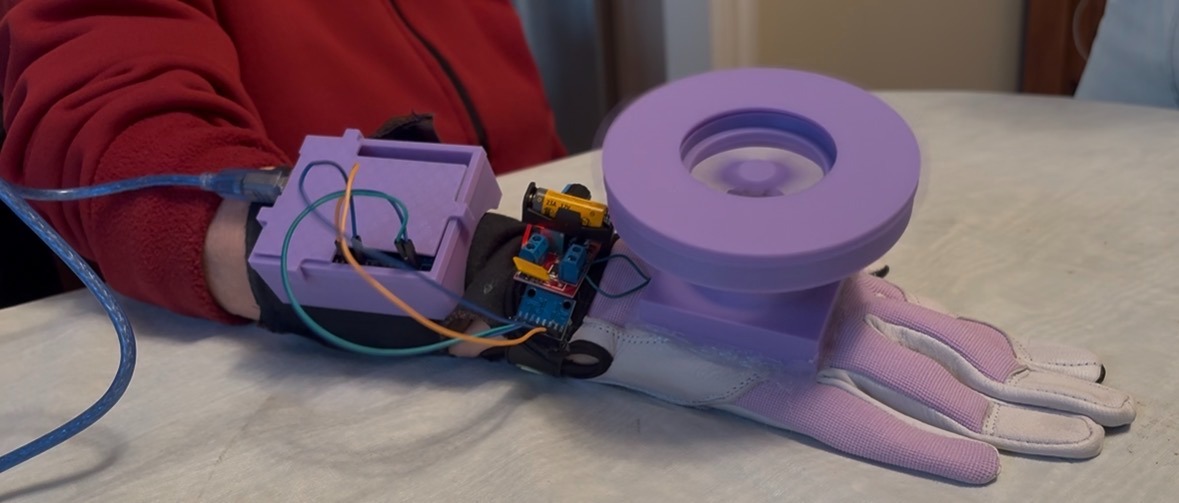
The team moved from a low-fidelity fabric and cardboard model to a works-like gardening-glove prototype with a 12 V high-RPM motor, 3D-printed wheel, removable weights, and wrist-mounted electronics.
A potentiometer allowed the user to adjust motor speed, while an IMU and Arduino collected motion data for analysis.
Engineering Details
CAD, 3D printing, Arduino Uno, IMU, MATLAB, Processing, 12 V motor, motor driver, potentiometer, weighted wheel, fabric prototyping, and user interview methods.
Implementation
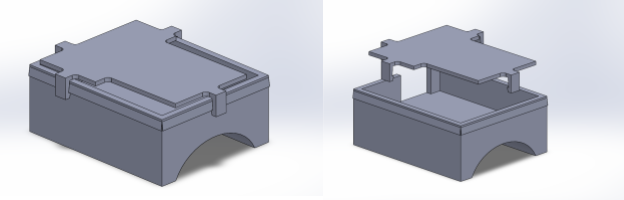
The final works-like prototype mounted a motor and gyroscopic wheel on the back of a glove, with extra wrist and forearm support for electronics and data acquisition.
A smaller wheel was selected after preliminary testing showed that the larger wheel demanded too much motor torque.
Testing
A stakeholder trial compared no speed, half speed, and full speed conditions, with and without added weights, while recording IMU acceleration data.
The report states that full speed and added weights increased visible oscillation amplitudes, so the prototype did not yet reduce tremor in its tested form.
Outcomes
The concept scored well for ease of use and cost, but the tested prototype was too bulky and could amplify motion because of wheel wobble and mass.
The project is strongest as an honest iteration study: usability improved, but mechanical balancing and miniaturization remain critical.
Use a smaller precision-machined metal wheel, improve shaft tolerancing, switch to a fingerless adjustable glove, reduce electronics size, and explore automatic motor activation based on tremor detection.
Gallery