Drone Height Control by Thrust Axis
A guided thrust-axis prototype uses ultrasonic sensing, Arduino control, and phase-lead correction to study vertical drone-position behavior.
- Institution
- Newton engineering preparatory program
- Team
- Maxime Hache, project teammates

- Mechanical Design
- Prototyping
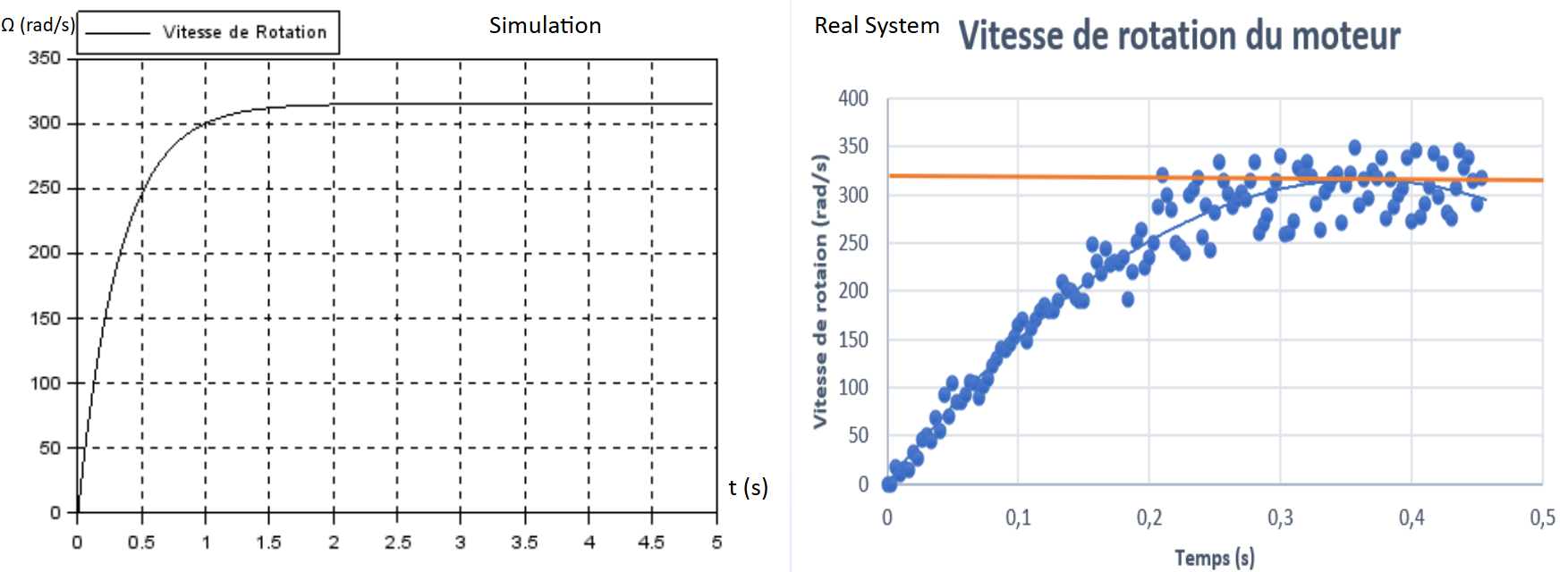
- Test & Validation
- Simulation
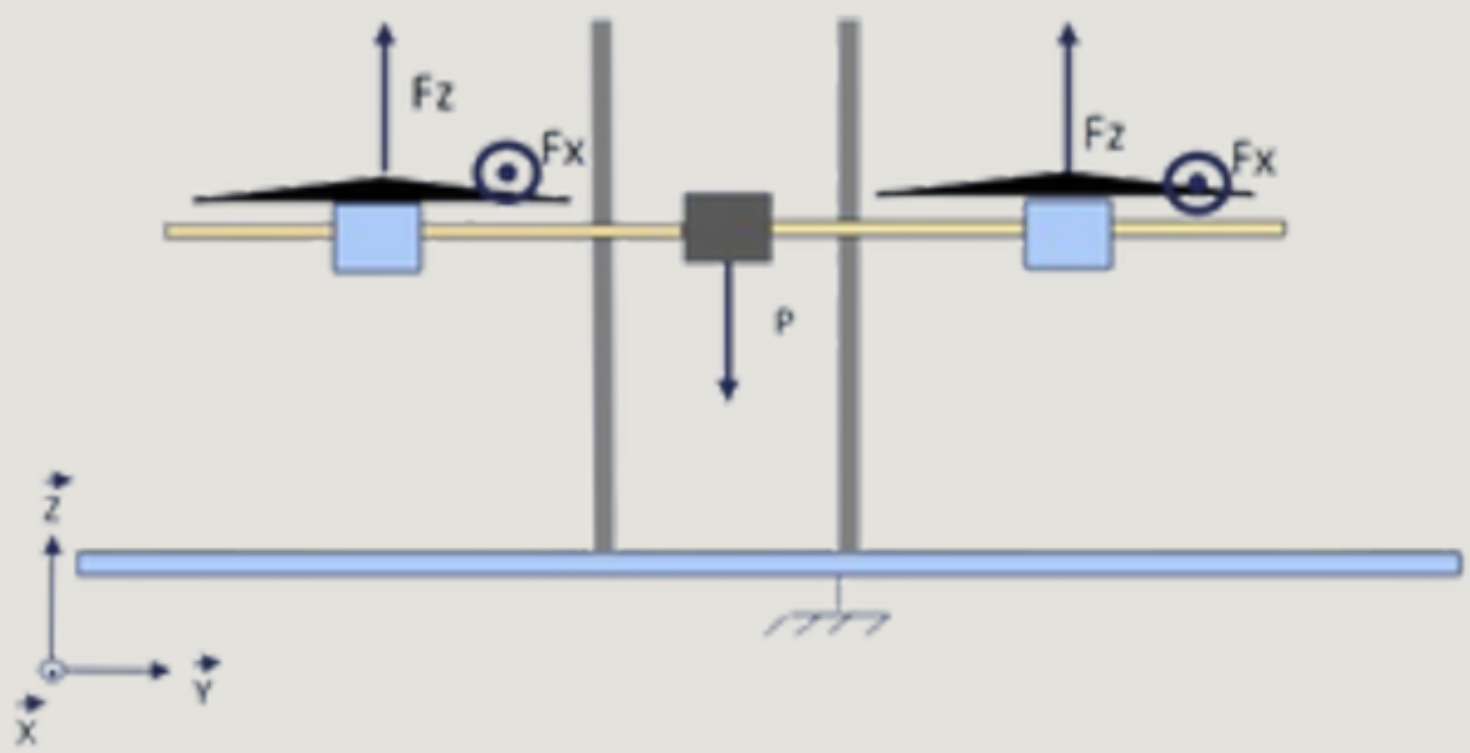
- Dynamics
- Control
- Embedded Systems

Overview
The presentation combines theoretical modeling, experimental height control, and comparison between uncorrected and corrected behavior.
Challenge
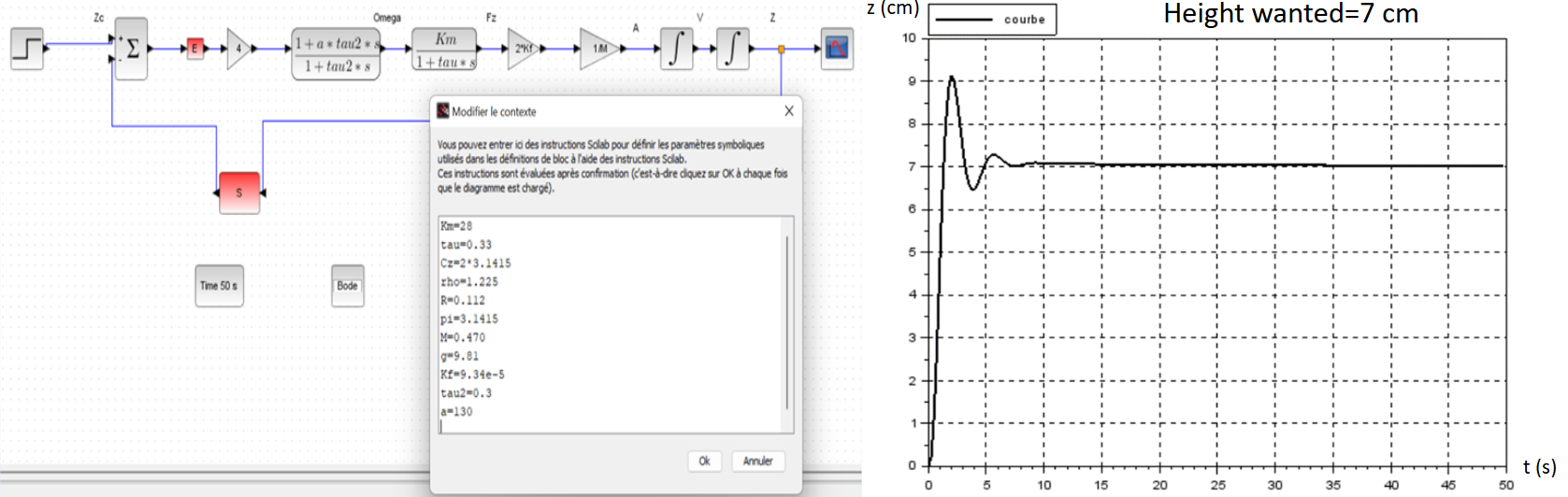
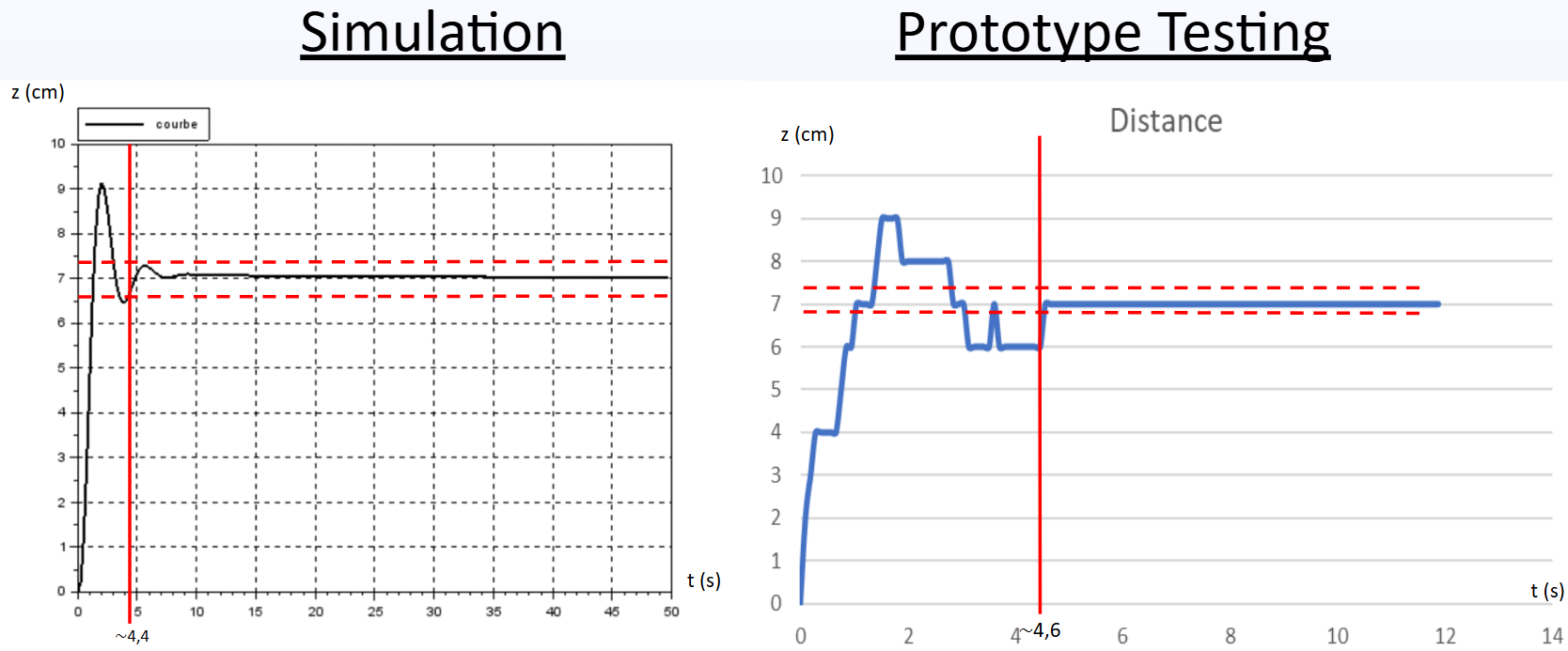
The stated requirements were stability, less than 5 percent final error, and response time under 5 seconds for a 7 cm height setpoint.
Process
The work models motor behavior and vertical dynamics, then adds a phase-lead corrector to stabilize the response.
Engineering Details
Arduino, ultrasonic sensor, ESC, brushless motor, propeller, battery, Xcos/Scilab modeling, phase-lead control, and experimental response plots.
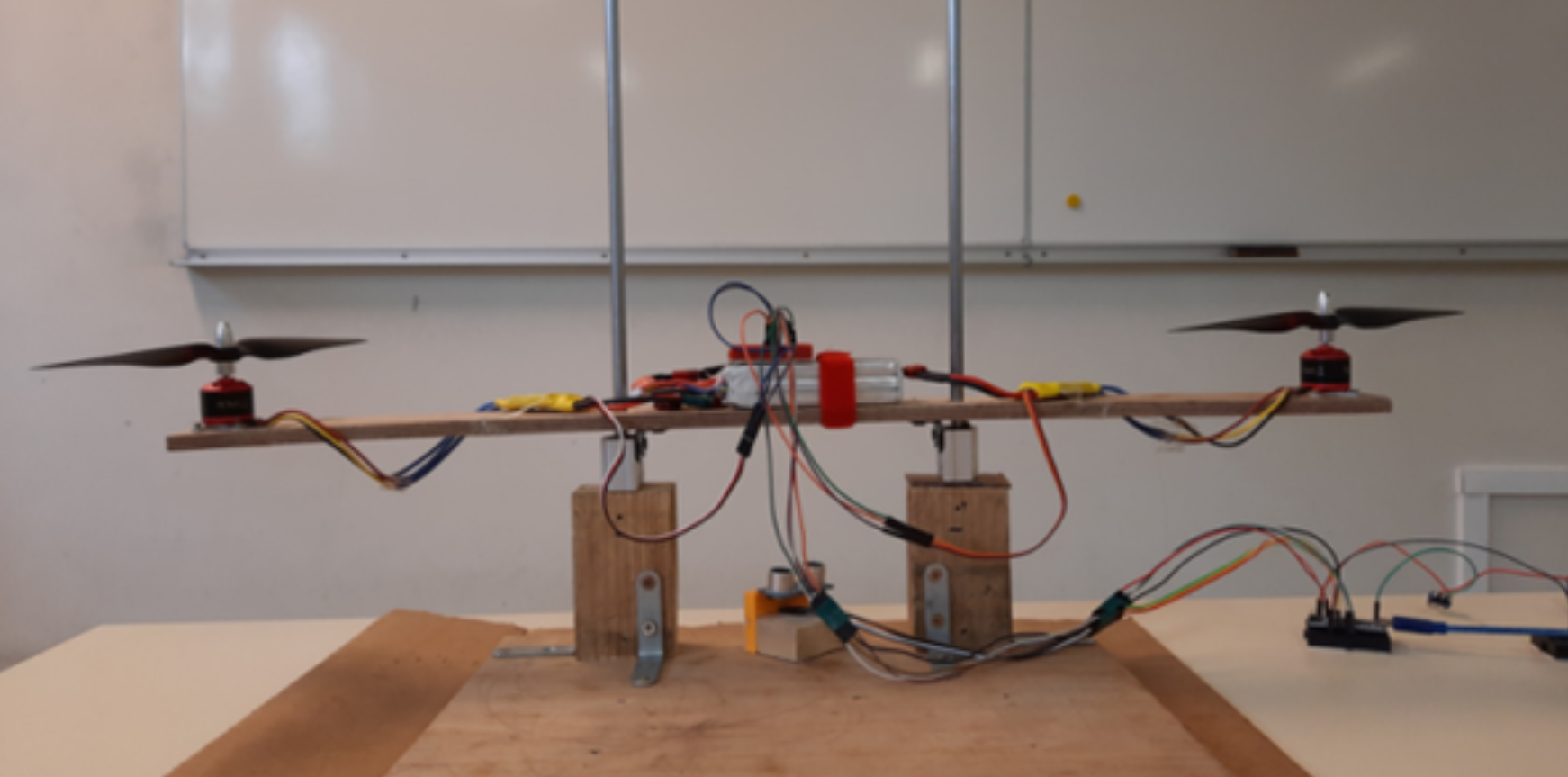
Implementation
A guided thrust-axis prototype used a motor and propeller assembly with an Arduino-based sensing and control chain.
Testing
The presentation compares open-loop response, closed-loop behavior without correction, and corrected closed-loop convergence.
Outcomes
The project makes feedback-control tradeoffs tangible: an unstable or divergent model can become usable when the controller adds the right phase behavior.
Document the Arduino code, sampling rate, sensor filtering, and repeated-trial statistics before making stronger performance claims.
Gallery