Drone Dynamics and Control Simulation ME236
A quadcopter lab sequence connects motor identification, state estimation, attitude control, hover behavior, and autonomous landing simulation.
- Institution
- University of California, Berkeley
- Team
- Maxime Hache, project teammates

- Test & Validation
- Simulation
- Dynamics
- Control
- Robotics
- Signal Processing

Overview
The source PDFs are lab instructions, not a finished personal report. The page is therefore concise and limited to the workflow evidenced by local files and images.
Challenge
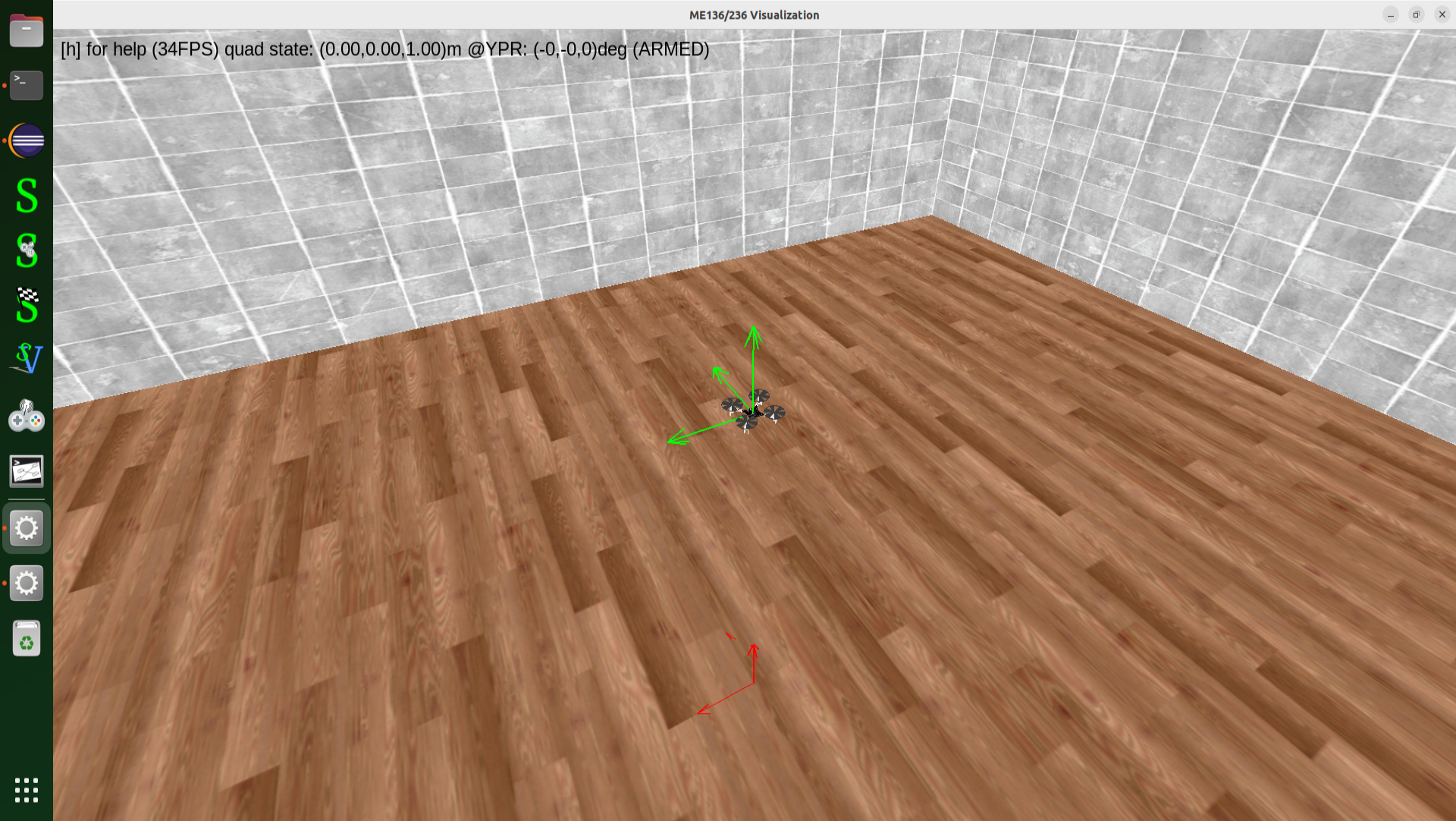
The lab sequence builds toward autonomous takeoff, hover, and soft landing while dealing with limited onboard sensing and unobservable horizontal position.
Process
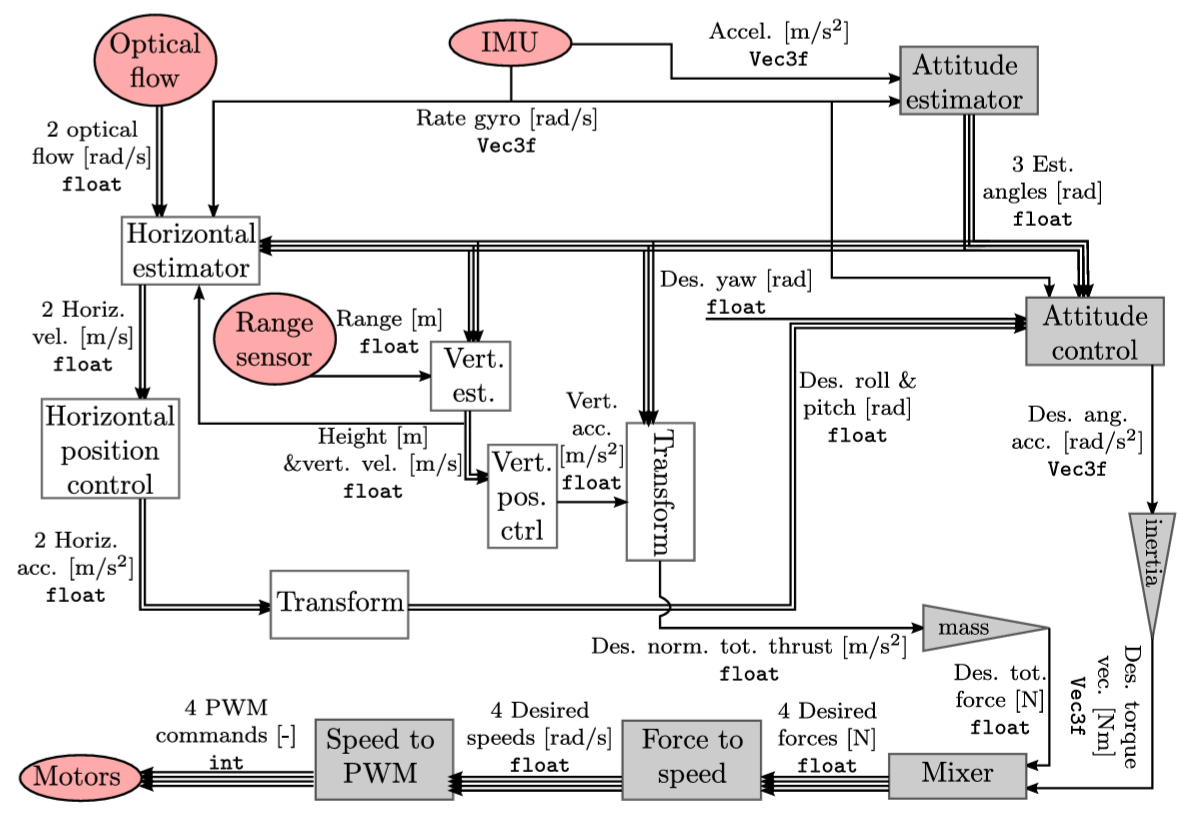
The workflow connects motor PWM mapping, propeller force estimation, gyro/accelerometer attitude estimation, torque mixing, attitude control, optical-flow/range sensing, and hover control.
Engineering Details
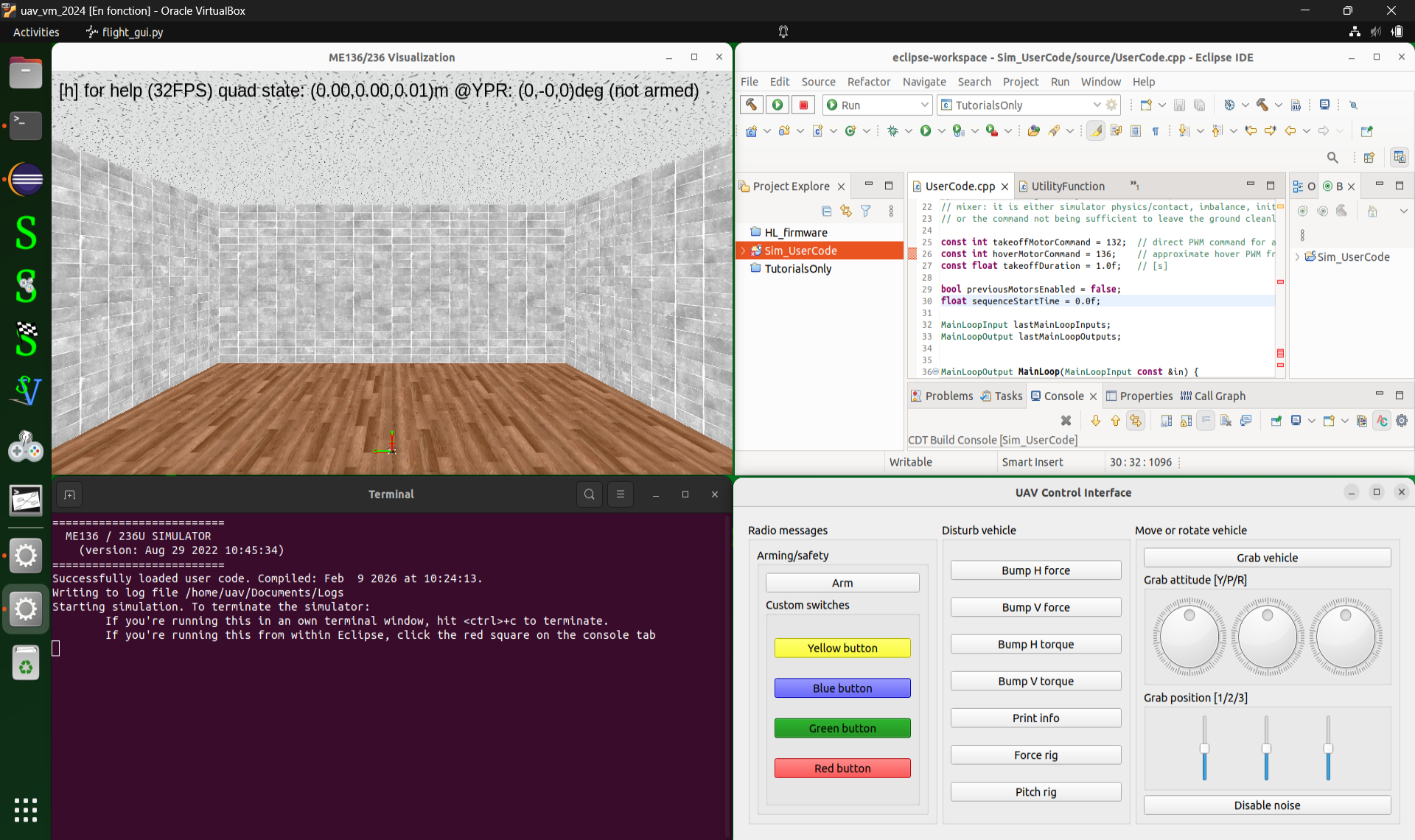
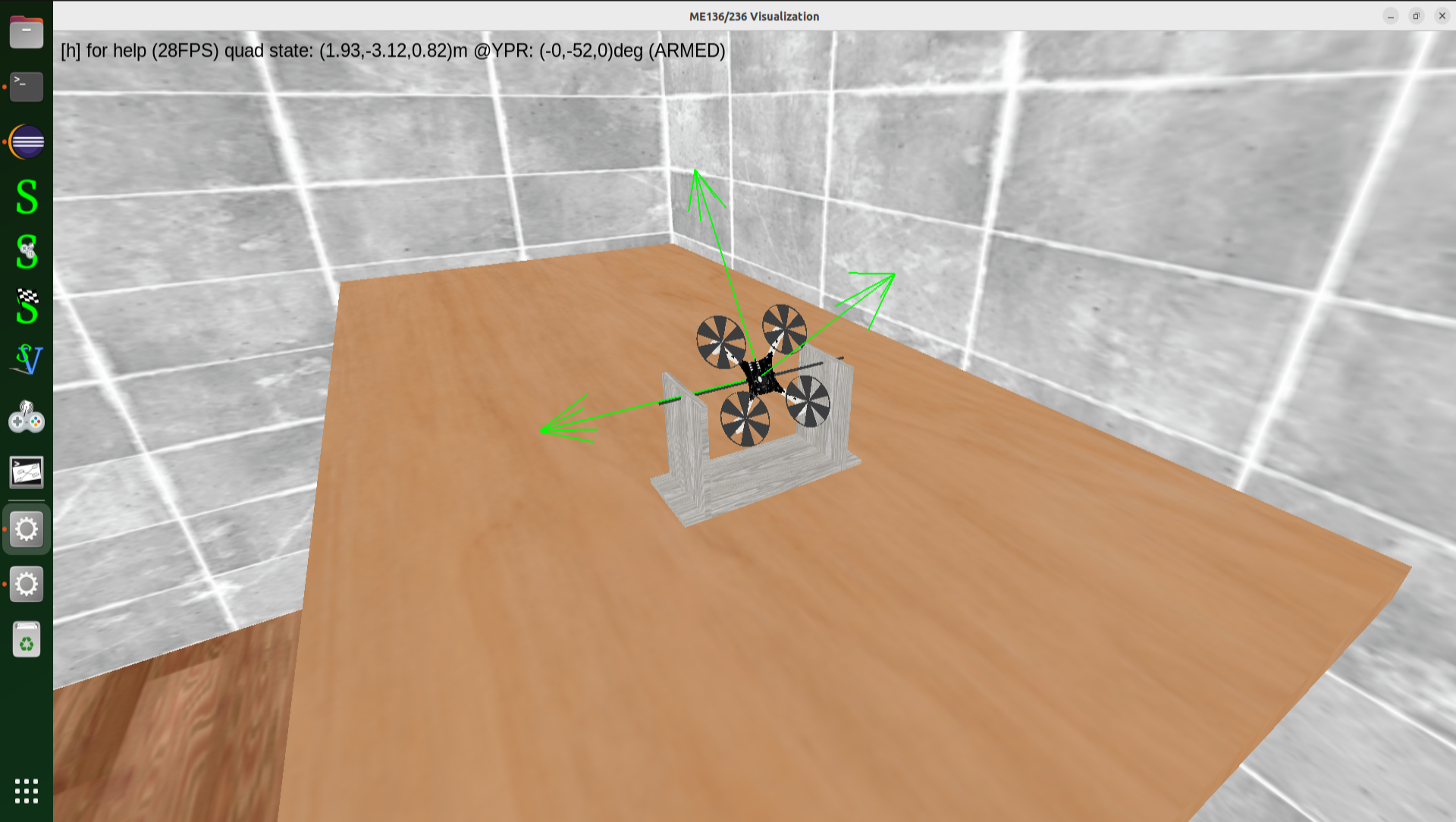
Virtual machine toolchain, C++ firmware, simulator, IMU, optical-flow/range sensing concepts, force rig, pivot rig, control block diagrams, and competition simulator.
Implementation
The gallery documents system architecture, simulator setup, force and pivot rigs, and hover results.
Testing
The lab handouts describe staged validation through sensor checks, motor-force mapping, attitude-estimator testing, pitch control on a rig, hover behavior, and a final autonomous target landing challenge.
Outcomes
The sequence shows the layered nature of flight-control engineering: identify actuators, estimate state, close attitude loops, then close position/height behavior.
Add my own code, plots, and final scores before expanding this into a detailed case study.
Gallery