Catenary Control Lab
A locomotive catenary model uses bond graphs, state-space analysis, discretization, and controller tuning to regulate contact behavior.
- Institution
- Arts et Metiers / ENSAM
- Team
- Maxime Hache, Tedjeddine Sebiane

- Test & Validation
- Simulation
- Dynamics
- Control

Overview
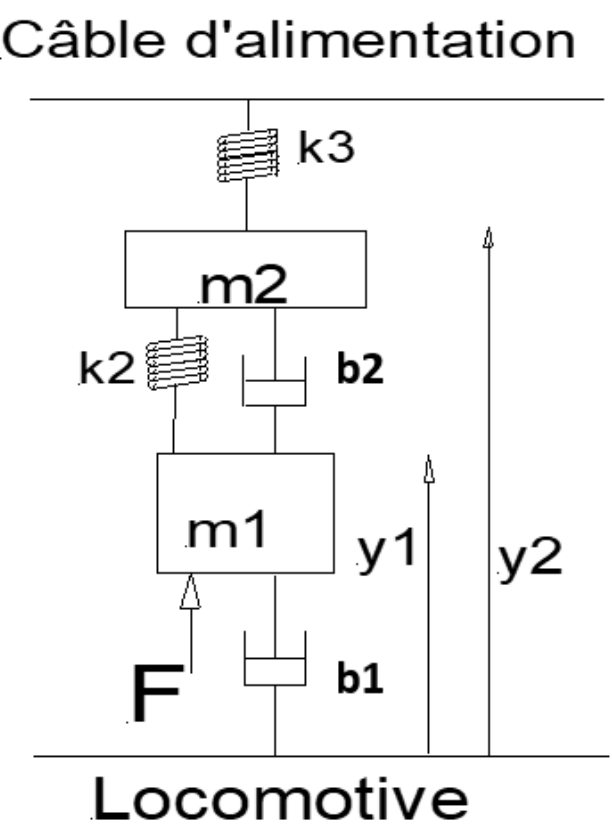
The source report models a locomotive catenary as masses, springs, dampers, and an electric actuator force, with the goal of regulating compression of a modeled contact spring.
Challenge
The controller must regulate y2 while the mechanical system exhibits resonance and slow dynamics.
Process
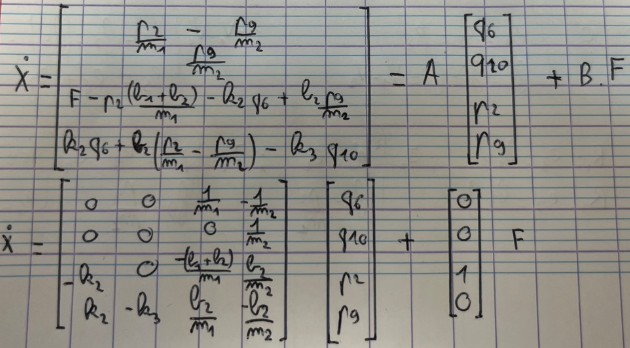
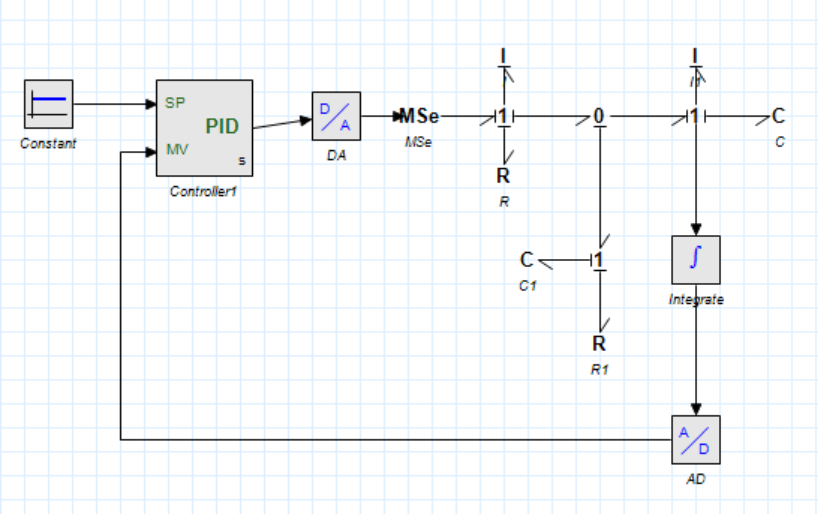
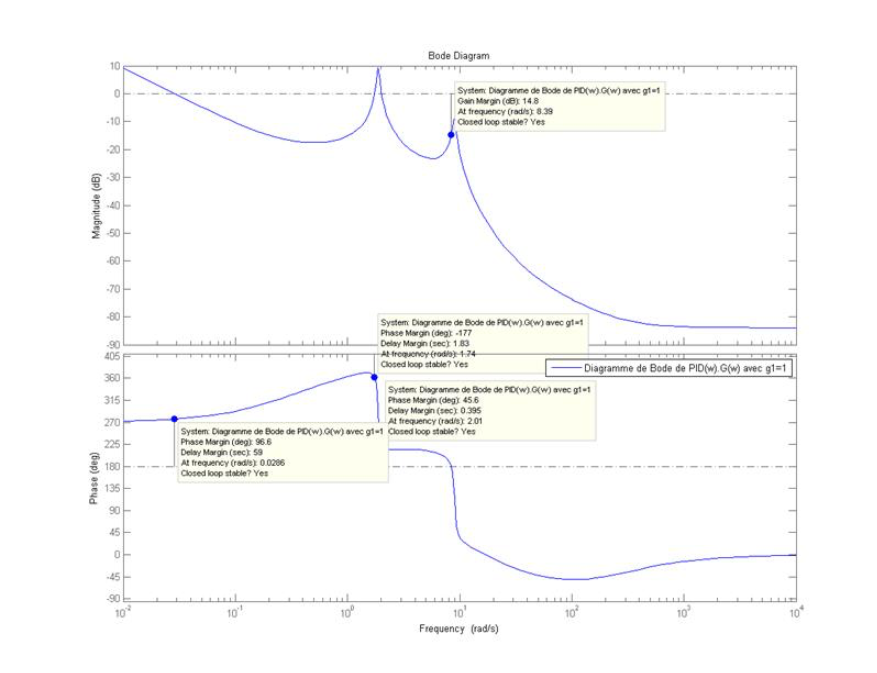
The work derives a bond-graph model, obtains a state-space representation, simulates in 20-sim, analyzes open-loop response and Bode plots, discretizes the system, and tunes controllers.
Engineering Details
Bond graph modeling, 20-sim, MATLAB transfer functions, Bode analysis, pole-zero maps, proportional control, PI and phase-advance/PID-style correction.
Implementation
The report documents matrices, transfer functions, sampled models, and controller expressions rather than a physical prototype.
Testing
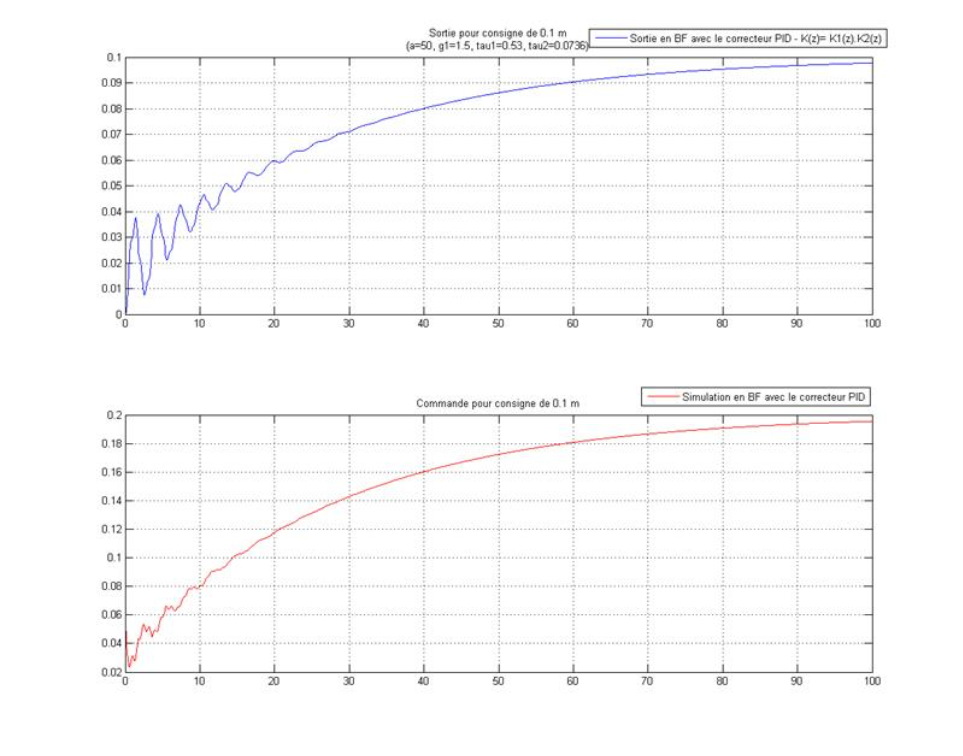
The final controller discussion reports convergence toward the setpoint without static error, with response-time tradeoffs and stability-margin discussion.
Outcomes
Controller tuning required balancing speed, damping, static accuracy, and resonance amplification.
Resolve the reported 20-sim closed-loop launch issue with DAC/ADC blocks and add clean numerical plots for public review.
Gallery